AMAI-MICCAI24-SPNAS
SP-NAS: Surgical Phase Recognition-based Navigation Adjustment System for Distal Gastrectomy
🎉 Published in Applications of Medical Artificial Intelligence: Third International Workshop, AMAI 2024, Held in Conjunction with MICCAI 2024. 🎉 → [PDF]
1. Overview
SP-NAS is a novel Surgical Phase Recognition-based Navigation Adjustment System designed to enhance distal gastrectomy procedures. By recognizing ten defined surgical phases in real time, SP-NAS automatically adjusts a 3D anatomical model to highlight the critical anatomical structures relevant for each phase. This system helps surgeons avoid manual camera manipulations or complex external tracking, streamlining the surgical workflow.
Key Contributions
- Workflow-based Navigation: Real-time recognition of the current surgical phase triggers an appropriate 3D reference view, eliminating the need for continuous manual viewpoint adjustment.
- Extensive Benchmarking: We compare multiple state-of-the-art action recognition models (SlowFast, MoViNet, and InternVideo) on 146 robotic distal gastrectomy cases using a 6-fold cross-validation scheme.
- High Clinical Relevance: Achieves near real-time inference on both desktop-class GPUs and AI edge devices (e.g., Jetson AGX Orin), facilitating immediate integration into real OR environments.
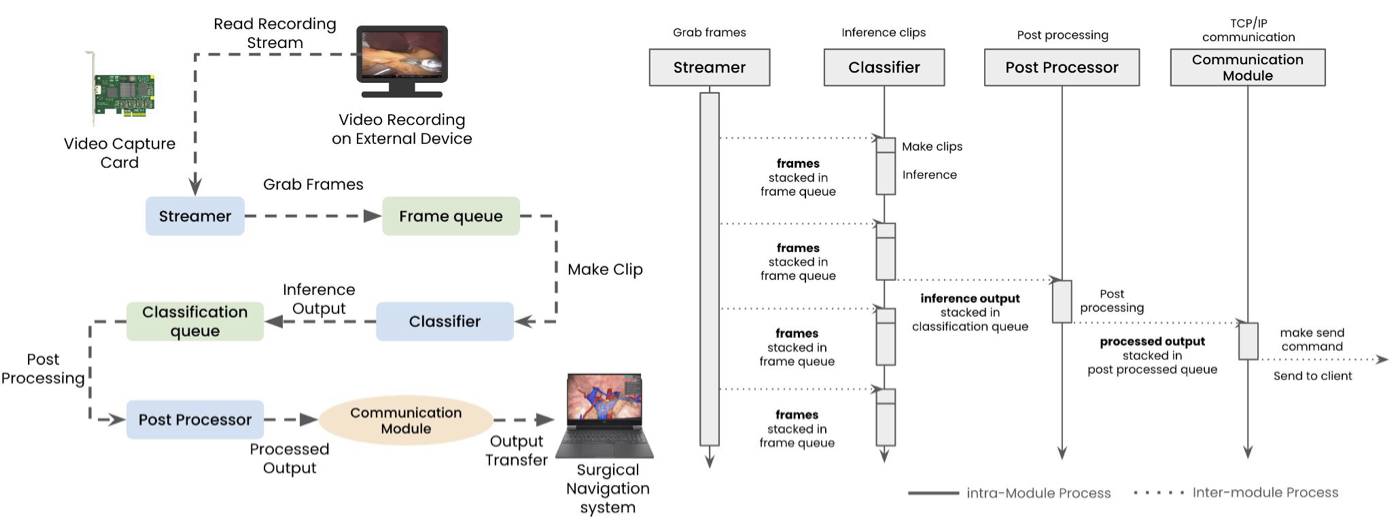 Figure 1: High-Level SP-NAS Architecture – A concise diagram showing the four modules: Streamer, Classifier, Post-processor, and Communication Module.
Figure 1: High-Level SP-NAS Architecture – A concise diagram showing the four modules: Streamer, Classifier, Post-processor, and Communication Module.
2. Motivation
Navigating complex minimally invasive surgeries often requires surgeons to reference preoperative patient-specific 3D models. However, continuously updating these models by hand is impractical. Our SP-NAS sidesteps these challenges by focusing on workflow-based view adjustments:
- Sequential Nature of Distal Gastrectomy: Each phase (e.g., greater curvature dissection, duodenal transection) has distinct anatomical targets.
- 3D Model Reference Views: We predefine three major vantage points (A, B, and C) mapped to relevant anatomical structures and blood vessels, automatically selected based on phase recognition.
3. Method
3.1 Surgical Phase Classification
We define ten distinct phases for distal gastrectomy (Preparation, Exposure of Anatomy, Dissection of Greater Curvature, Duodenal Transection, etc.), and three 3D model reference views (A: Splenic lower pole area, B: Infrapyloric area, C: Superior duodenal area).
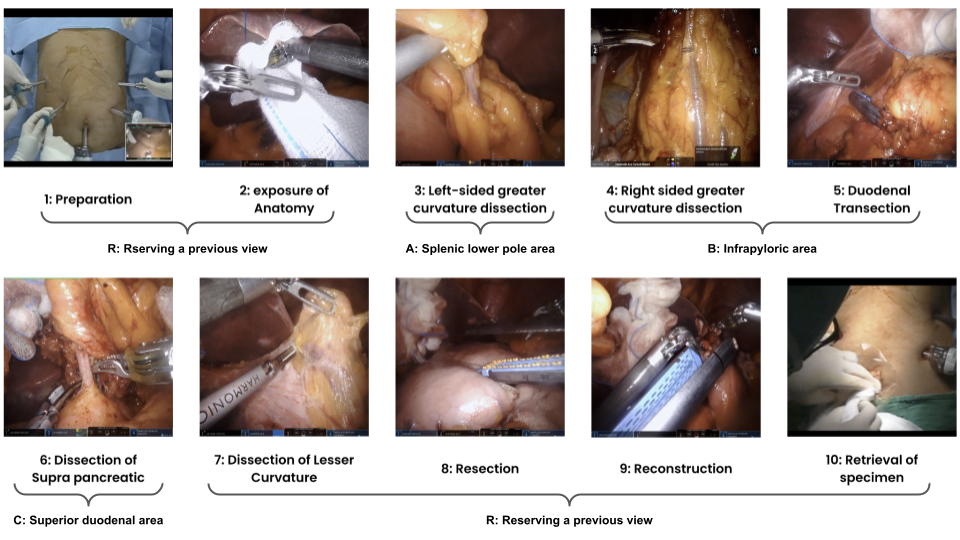
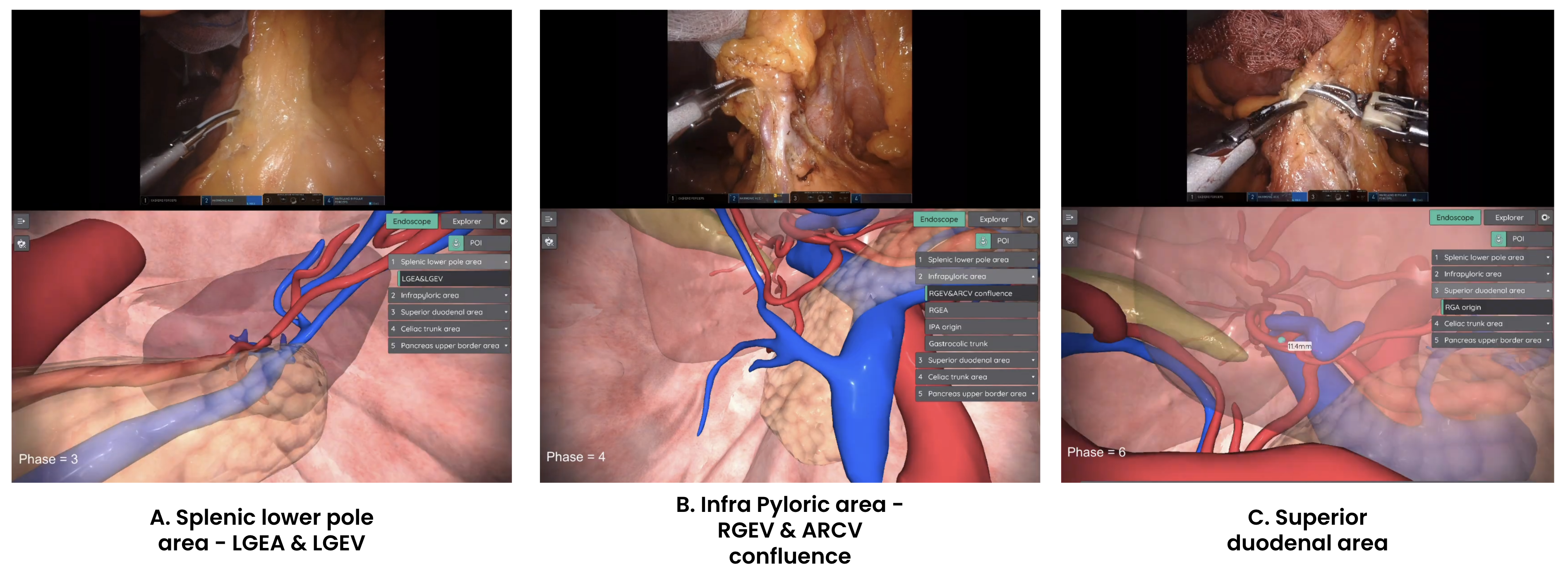 Figure 2: Surgical Phase and Reference View Definitions
Figure 2: Surgical Phase and Reference View Definitions
Our classifier leverages representative action recognition models:
- SlowFast (ResNet-50 backbone)
- MoViNet (A0 configuration)
- InternVideo (ViT-B backbone)
Each model processes short video clips (e.g., 4–16 frames) extracted at 1 FPS, then outputs a predicted phase in real time.
3.2 Navigation Adjustment
For each recognized phase, the system automatically rotates/zooms/pans the patient’s 3D anatomical model to the appropriate reference viewpoint. In practice:
- The Post-processor enforces stability, smoothing out transient misclassifications.
where $C_t$ denotes a surgical phase class at timestamp $t$, $N$ denotes a certain period of time for stability.
- The Communication Module sends the final recognized phase to the navigation software, which changes the 3D model view accordingly.
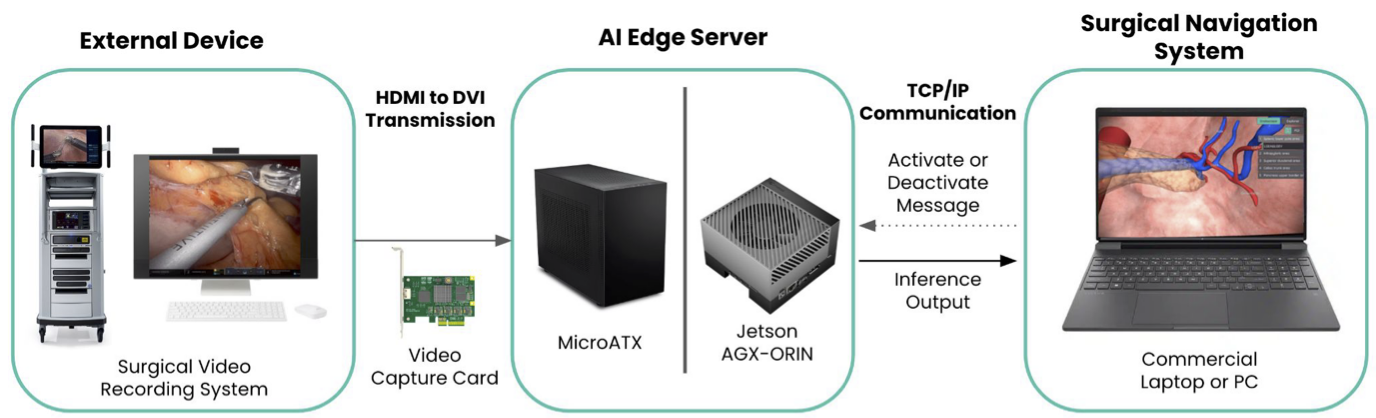 Figure 3: Navigation System Diagram – Show how SP-NAS connects to a standard surgical navigation platform, detailing the networking or interface components.
Figure 3: Navigation System Diagram – Show how SP-NAS connects to a standard surgical navigation platform, detailing the networking or interface components.
4. Experiments
We collected 146 robotic distal gastrectomy videos (IRB-approved) and partitioned them in a 6-fold manner: 110 for training, 22 for validation, 14 for testing. A total of 10 surgical phases were annotated by expert surgeons.
4.1 Quantitative Results
We benchmarked three models across different input clip sizes (4, 8, or 16 frames) and different hardware settings (desktop GPUs vs. embedded AI boards). Below is a sample of the results (more in the paper):
| Model | Input (Frames) | Accuracy (Test) | Latency (ms) |
|---|---|---|---|
| SlowFast (R50) | 16 | 85.86% | 23.19 (RTX2060) |
| MoViNet-A0 | 16 | 84.13% | 5.99 (RTX2060) |
| InternVideo (ViT-B) | 16 | 87.29% | 96.76 (RTX2060) |
Observations:
- InternVideo attains the highest accuracy but with higher latency.
- MoViNet-A0 trades off some accuracy for significantly lower compute time.
- Simple post-processing (phase stabilization) adds up to ~2% improvement across all models.
4.2 Qualitative Analysis
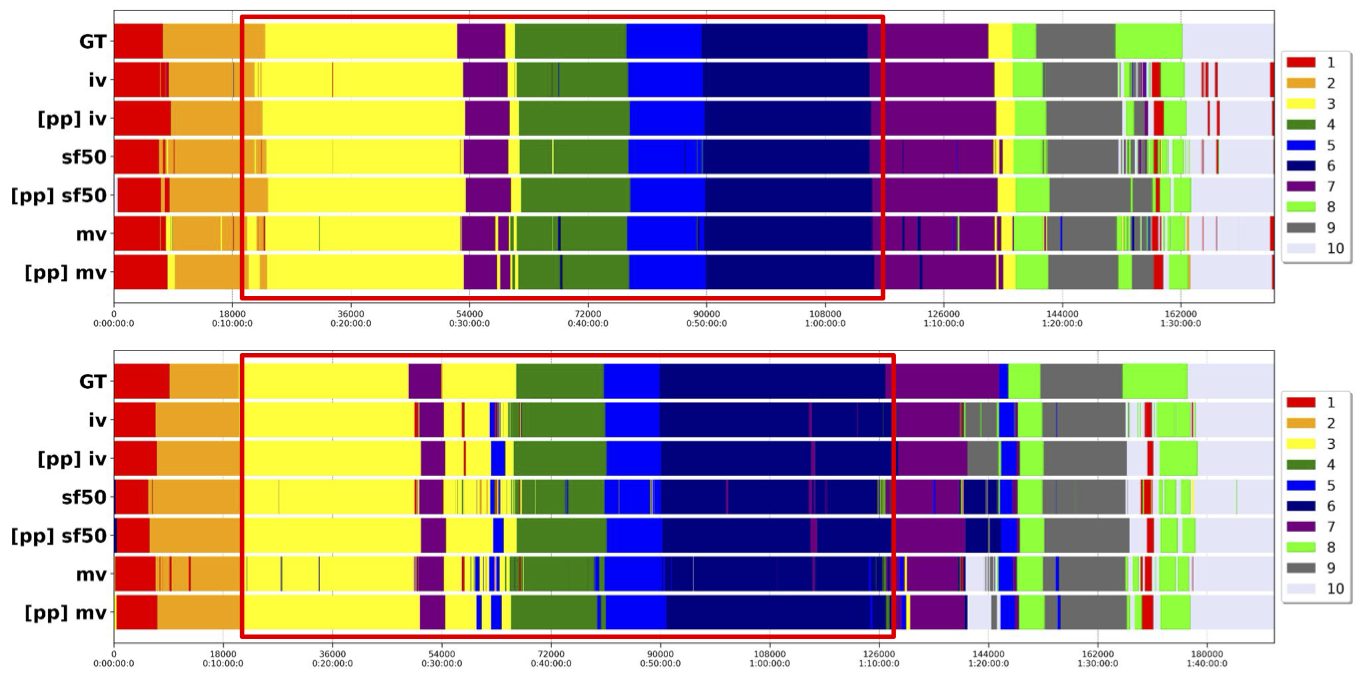 Figure 4: Phase Timeline Visualization – Show the ground-truth phase timeline vs. predicted timeline for a high-performing test case and a more challenging one. iv stands for InterVideo, sf stands for SlowFast, and mv stands for MoViNet. pp stands for post-processing.
Figure 4: Phase Timeline Visualization – Show the ground-truth phase timeline vs. predicted timeline for a high-performing test case and a more challenging one. iv stands for InterVideo, sf stands for SlowFast, and mv stands for MoViNet. pp stands for post-processing.
5. Demo Video
Check out our demo video to see SP-NAS in action:
- Phase Recognition: The bottom panel displays real-time classification results for each incoming video frame.
- 3D Navigation: The top panel shows how the reference 3D model instantly updates to highlight key vessels and organs relevant to the current phase.
6. Conclusion and Future Work
We proposed SP-NAS, a software-only framework that unifies workflow-based navigation adjustment with surgical phase recognition. Our results demonstrate robust performance under various conditions:
- Practical Implementation: SP-NAS is easy to integrate into existing laparoscopic or robotic setups.
- Scalability: No specialized tracking hardware is needed, making it cost-effective for broad deployment.
Next Steps:
- Multi-Center Study: Validate across different hospitals with diverse patient populations.
- Extension to Laparoscopic Gastrectomy: Laparoscopic procedures often have dynamic camera motions, challenging the phase recognition.
- Combining with Other Modalities: Explore adding AR overlays to further enhance user experience.
References
- Feichtenhofer, C., et al. “SlowFast Networks for Video Recognition.” ICCV, 2019.
- Kondratyuk, D., et al. “MoViNets: Mobile Video Networks for Efficient Video Recognition.” CVPR, 2021.
- Wang, Y., et al. “InternVideo: General Video Foundation Models via Generative and Discriminative Learning.” ArXiv, 2022.
Contact
For further inquiries or collaboration opportunities, please reach out:
- Email: hyeongyuc96@hutom.io , yjh2020@hutom.io
- Institution: Hutom, Seoul, Republic of Korea